Su altında gizli ve sessiz bir şekilde ilerleyen denizaltılar, savaş ve araştırma amaçlı kullanılan araçlardır. Ancak bu muazzam su altı araçlarının tasarımında, bazı sorular insanın aklını kurcalayabiliyor. Tasarımlarının, su altındaki hareketlerini kolaylaştırmak ve performanslarını artırmak için birçok faktöre bağlı olduğunu biliyoruz ancak denizaltılarda, neden özellikle oval burun tercih ediliyor?
Siz de gece uyumadan önce denizaltıların burnunun neden sivri olmadığını düşünenlerden misiniz yoksa biz mi biraz değişiğiz? Her iki durumda da kabul edelim ki bu konu oldukça ilgi çekici. Cevabı da en az kendisi kadar ilginç unsurlar bulunduruyor.
Örneğin köpek balıkları ve yunuslar, su altı dünyasının en hızlı yüzen canlıları arasında bulunuyor değil mi? Bu hızlarına burunlarının da etkisi olduğu kaçınılmaz bir gerçek. Peki mühendisler, su altı araçlarının burunlarını balıklara göre tasarlamıyorsa o zaman neyi baz alıyorlar? Gelin, birlikte detaylıca göz atalım.
Soğuk Savaş’tan önce, çoğu denizaltının pruvası sivriydi.
Bunun nedeni, eski denizaltıların özellikle uzun mesafeler kat ederken su altından ziyade yüzeyde daha fazla zaman geçirdikleri için gemilere daha çok benzemeleriydi. Eski denizaltılar, dizel motorlarının çalışması için temiz hava girişine ihtiyaç duyduklarından uzun süre su altında kalamazlardı.
Ek olarak; denizaltılar, suya batırıldıktan sonra elektrik motorlarına güç veren bataryalarla çalışıyordu. Ancak bataryalar çok uzun süre dayanmadığı için sıkıntı çıkarıyordu.
Eski araçlar, su altında sadece 12 saat kadar kalabilirken; savaşın sonlarına doğru Alman tasarımları, yaklaşık 5 knot (rüzgâr hızı) hızla birkaç gün su altında kalabilme kapasitesine ulaşmıştı.
Eski tip su altı araçları, su altında çok yavaş hareket ediyorlardı.

Örneğin Amerikan Balao sınıfı bir denizaltının su altındaki azami hızı, 16,67 km’nin biraz altındayken; yüzeyde seyahat ederken 37,04 km’nin üzerine çıkabiliyordu. Eski denizaltılar ile uzun mesafeler boyunca su altında seyahat etmek mümkün değildi.
İşte bu yüzden uzun mesafeler kat eden gemiler gibi yüzeye çıkıyorlardı; su altına inmek, sadece saldırı ya da kaçış içindi. Yani kısaca eski su altı araçları, çoğunlukla gemi gibi işlev gördükleri için gemi şeklinde pruvalara sahipti.
Bu araçlar tasarlanırken odak noktası su altı performansı değil, su üstü performansıydı.

Ancak daha sonra nükleer güç ortaya çıktı ve su altı performansı, önemli bir olay hâline geldi. Ve çoğu zaman olduğu gibi denizaltı tasarımcıları zor yoldan öğrenmek zorunda kaldılar. 1950’lerin başında ABD Donanması, oyunun kurallarını değiştirdiğini kanıtlayan iki eşsiz su altı aracı inşa ediyordu: USS Nautilus ve USS Albacore.
1954 yılında denize indirilen USS Nautilus, dünya çapında nükleer enerjiyle çalışan ilk denizaltıydı. Nükleer güç, denizaltıların o andan itibaren su altında uzun mesafeler kat edebileceği anlamına geliyordu. Sonuç olarak hem hız hem de dayanıklılık önemli ölçüde artmıştı.
ABD Donanması’na ait USS Nautilus, 21 Ocak 1954
Ancak Nautilus’un gemi şeklinde düzgün pruvası olmasa da yarı sivri pruvası vardı. Pruva, ultra modern sonarları etrafında şekillendirilmişti. Ancak Nautilus, çok gürültülü bir araç olduğu için sonarlar hemen hemen hiçbir işe yaramıyordu.
Araç ne zaman 12,96 km hızlı hareket etse sonarları aracın kendi gürültüsünden sağırlaşıyor ve kullanılamaz hâle getiriyordu. Bu sorun, yüksek hızlarda aşırı titreşimlere neden olan pruva ve yelkenindeki ciddi tasarım hatalarından kaynaklanıyordu.
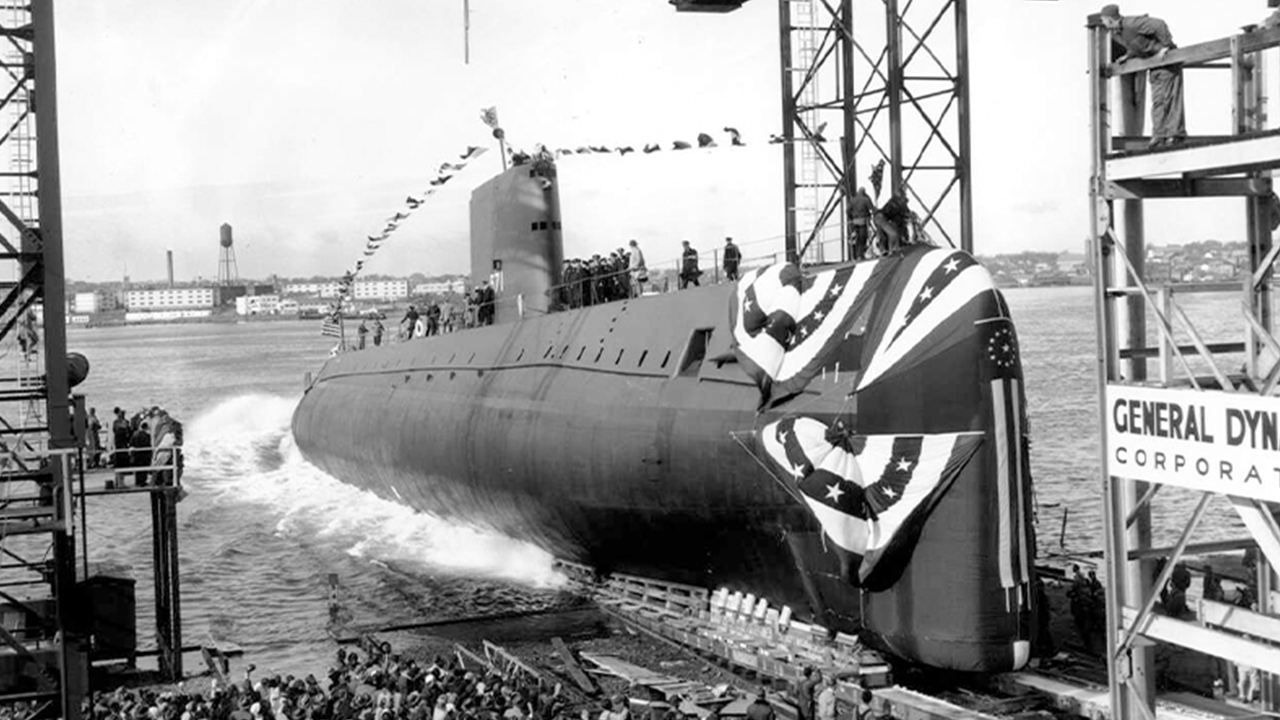
Dizel motorlu USS Albacore; yüzey performansına kıyasla, batık performansına odaklanan denizaltı tasarlamaya yönelik ilk girişimdi.

USS Albacore (AGSS-569)
Albacore’un yeni gövde şekli, “gözyaşı damlası” olarak biliniyordu. 1953 yılında denize indirilen USS Albacore, tasarım unsurlarının değiştirildiği ve test edildiği birkaç revizyondan geçti. İlk deniz denemeleri sırasında, eski Guppy tipi araçlara kıyasla yarı şaft gücüyle maksimum hızda çalışabileceği anlaşıldı.
Albacore’un tasarımı, eski gemi şeklindeki tasarımlara kıyasla devrim niteliğindeydi çünkü çok daha hızlıydı ve manevra kabiliyeti yüksekti. Azami hızı 46,3 km üzerindeydi ve Albacore dizel motorlu olmasına rağmen Nautilus’tan çok daha sessizdi.
Gövde tasarımı, 1959’da Amerikan nükleer saldırı denizaltılarının ilk sınıfı olan Skipjack sınıfında ve o tarihten bu yana tüm modern Amerikan denizaltılarında kullanıldı. Ancak tüm bunların bir dezavantajı vardı, yüzeyde çok dengeli değildi.
Aynı tarihlerde Sovyetler Birliği de ilk nükleer su altı aracı olan K-3 Leninsky Komsomol’u hizmete soktu, bu aracın oval bir pruvası vardı ve eskilere göre çok daha verimli olduğu kanıtlanmıştı.
Peki oval pruvayı bu kadar iyi bir tasarım tercihi yapan şey nedir?

Anlaşılması gereken ilk şey, su altı araçlarının dalışlar sırasında aşırı su basıncı altında olduğudur. Modern denizaltılar, eskisinden çok daha derinlere dalıp 3350 ft’lik rekorla 1000 ft’in üzerinde dalış yapabiliyor. Bu tür aşırı basınçlara dayanmak için teknenin geometrisi büyük fark yaratıyor.
USS Nautilus’tan da öğrenildiği gibi; pruvanın şekli, üretilen akış gürültüsü miktarında sorun çıkarılabiliyor. Eğer çok fazla gürültü varsa tekne sonarını kullanılamaz hâle getirebilir. Daha da önemlisi, gürültülü bir su altı aracını tespit etmek çok daha kolay olacaktır ki bu da savaş durumlarında ölümcül olabilir.
Daha kıvrımlı pruvalar daha az sürtünme üretir, bu da daha az akış gürültüsüne neden olur. Bir denizaltı, su altında ilerlediği esnada dirençle karşılaşırken; akış gürültüsü, dalış uçaklarının konumlandırılmasından ve aracın genel şeklinden de etkilenir.
Artık bu sorunun da cevabını öğrendiğinize göre, gece rahat bir uyku çekebilirsiniz. 🙂 Yorumlarda görüşmek üzere.